Papers
|
|
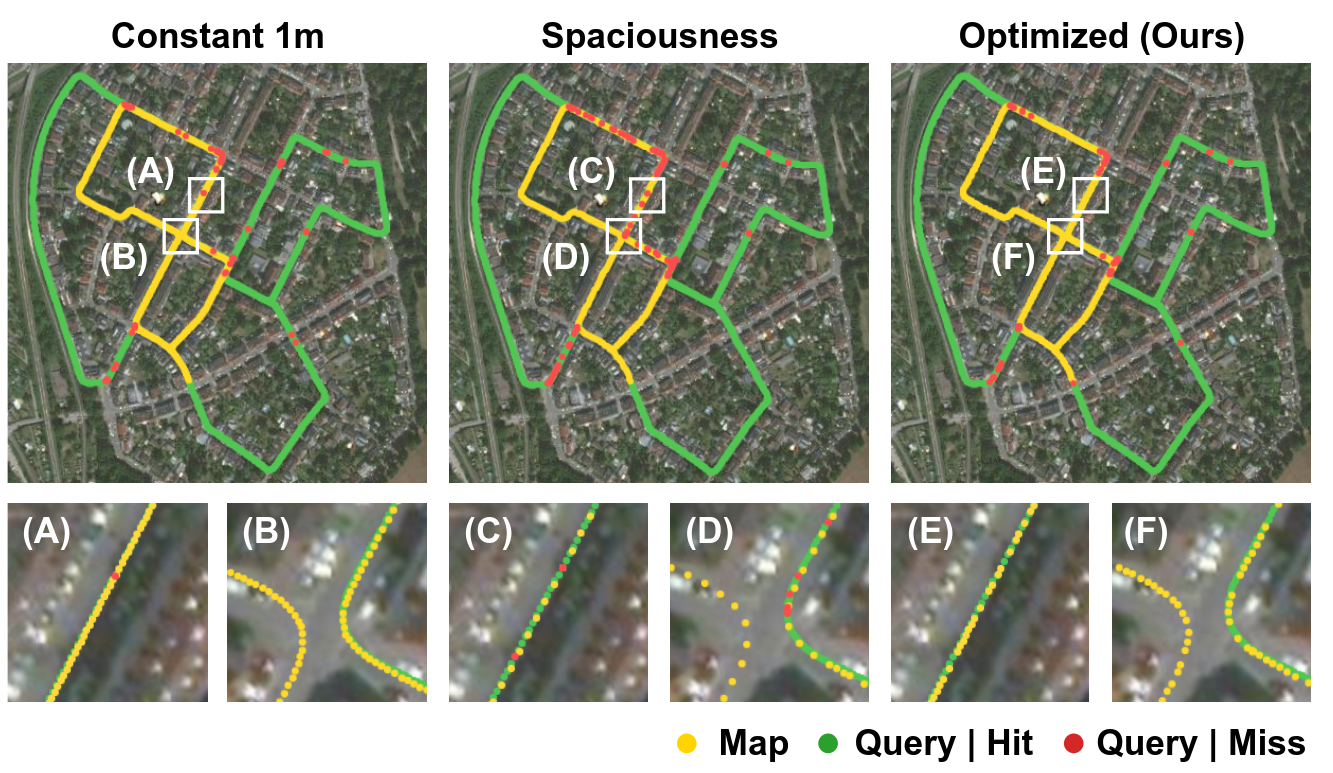
Does Sample Space Matter? Preliminary Results on Keyframe Sampling Optimization for LiDAR-based Place Recognition
|
Nikolaos Stathoulopoulos, Vidya Sumathy, Christoforos Kanellakis and George Nikolakopoulos
Lulea University of Technology |
|
|
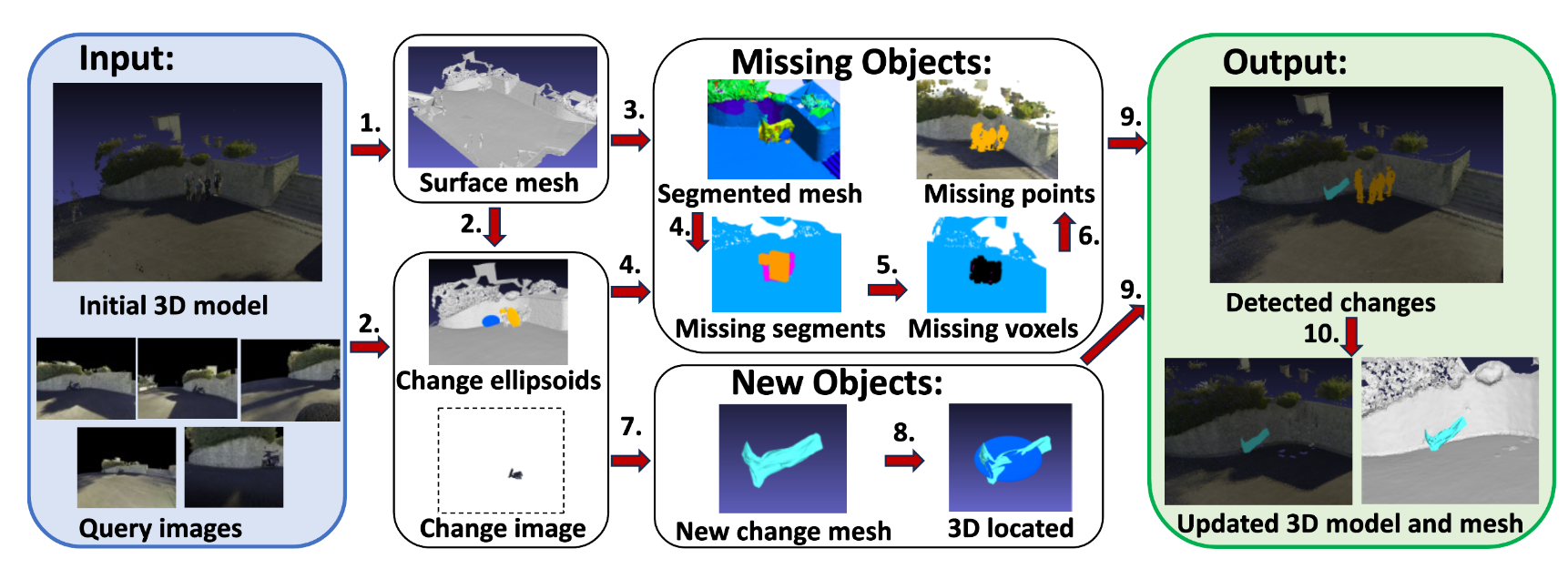
Change Detection and Model Update Framework for Accurate Long-Term Localization
|
Stefan Larsen, Ezio Malis, El Mustapha Mouaddib, Patrick Rives
ACENTAURI team at Inria, Sophia-Antipolis, France |
|
|
LOSS-SLAM Lightweight Open-Set Semantic Simultaneous Localization and Mapping
|
|
|
|
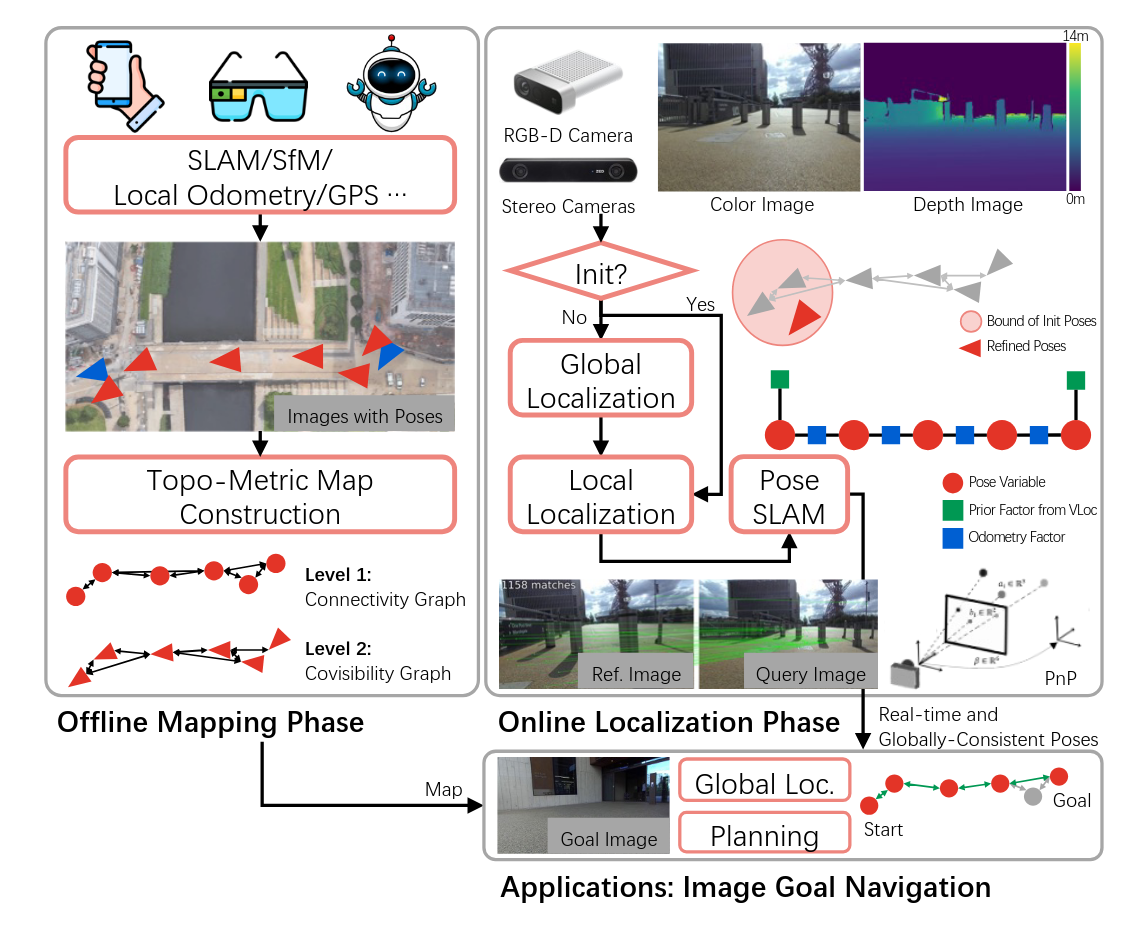
LiteVLoc Map-Lite Visual Localization for Image Goal Navigation
|
Jianhao Jiao, Jinhao He, Changkun Liu, Sebastian Aegidius, Xiangcheng Hu, Tristan Braud, Dimitrios Kanoulas
University College London, The Hong Kong University of Science and Technology |